Work Experience
AI Engineer
July 2021 - December 2021 & May 2022 - August 2022
Ocado Intelligent Automation (Previously Kindred AI)
2021: Researched and implemented deep reinforcement learning and impedance control model for robotics arm behavior control. Experimented in Drake simulator with Haddington Dynamics Dexter Robotics Arm.
2022: Implemented a human teleoperation for Behavior Cloning pipeline that aims to collect expert data and train policy for UR5 pick-and-place actions with a Robotiq gripper. Expert data are collected using VIVE Pro 2. This pipeline will be used for future robotic manipulation tasks.

Machine Learning Engineer
June 2020 - September 2020
Ericsson
Assisted mentor with building tensorflow framework to train sequencial data. Performed neural network optimization. Improved deep learning strategies in algorithm.

Projects
Machine Learning Researcher/ROS Engineer
UBC Open Robotics
A team member in the software subteam. Collaborated on the design of a waiter robot for ROBOCUP@HOME competition. Reseached and tested algorithms for supervised learning in computer vision module for the robot. Implemented the manipulation of robot arm, gripper with ROS in Gazebo, designed testing environment in Gazebo for grasping behavior training.
CodeML Hackathon hosted by PolyAI
Implemented an image classification algorithm for 10 classes (animals and objects) using Tensorflow framework within 48 hours, got the 4th place.
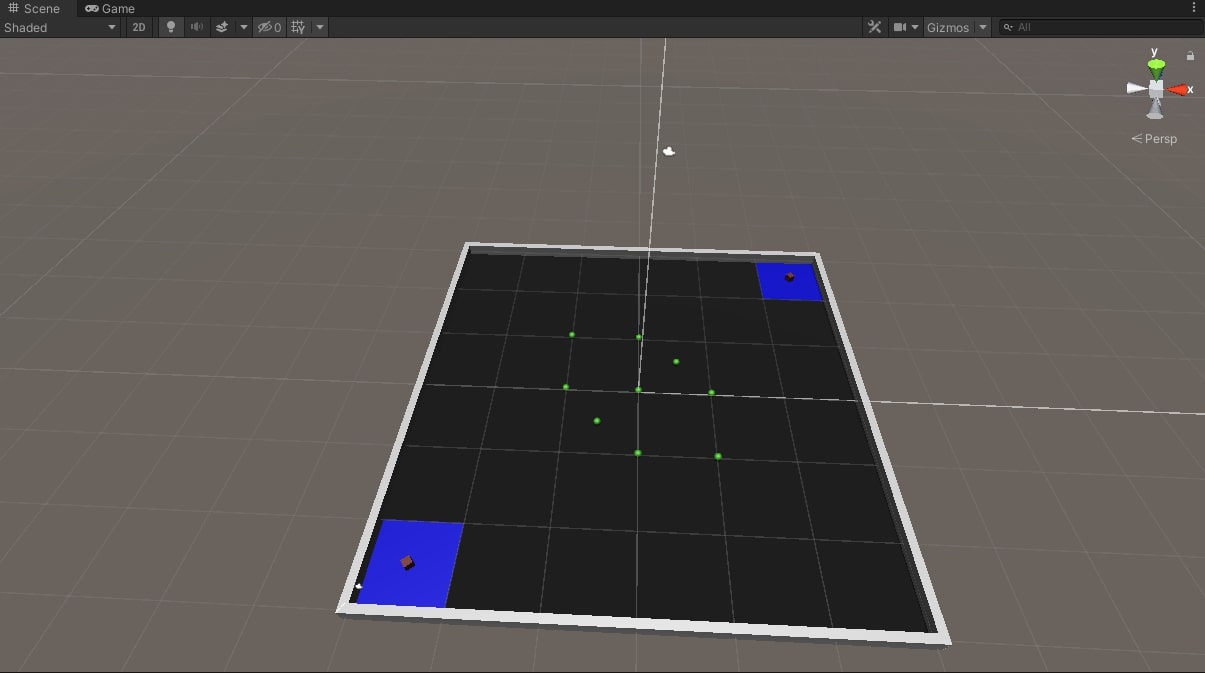
Robot tournament (Game Bots) using Unity ML Agents
Trained Unity's ML agents with rewards and punishments to compete with other agents in a capture-ball-game. Click to watch demo.
Reinforcement Learning of Robot Arm pick-and-place actions in Pybullet
UBC Motion Control and Character Animation Laboratory
Implemented and trained a policy in Pybullet for robotics arm pick-and-place actions that aims to achieve robust behaviors when dealing with unknown environments in real-time.
Philosophy Paper on Mind-Body Problem
The Mind-Body problem is a debate about the relationship between the human physical body and the mental process takes place in the brain. In my paper I defended Frank Jackson's Knowledge Argument, that our world contains both physical and mental properties, against Physicalism's ability hypothesis.